Sensor PH adalah instrumen untuk mengukur konsentrasi hidrogen dalam sebuah larutan. Baik sensor pH untuk air maupun untuk tanah perlu dikalibrasi berkala agar ke-akuratannya terjamin.
Untuk menjamin keakuratan sensor ph, diperlukan bahan buffer solution dengan pH diketahui dan akurat. buffer solution yang digunakan umumnya adalah dengan pH 4.0 dan pH 7.0.
Beberapa produsen sensor pH juga menyertakan instrumen untuk melakukan kalibrasi secara manual. Namun jika dihubungkan dengan arduino maka, arduino (instrumen baca) juga perlu dikalibrasi. Dalam atikel ini disertakan program interface kalibrasi sensor pH melalui serial monitor, yang merupakan pengembangan dari library sensor pH yang ada. Hasil kalibrasi akan tersimpan dalam EEPROM untuk digunakan dalam pengukuran normal.
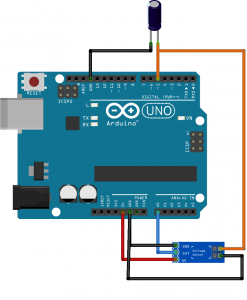
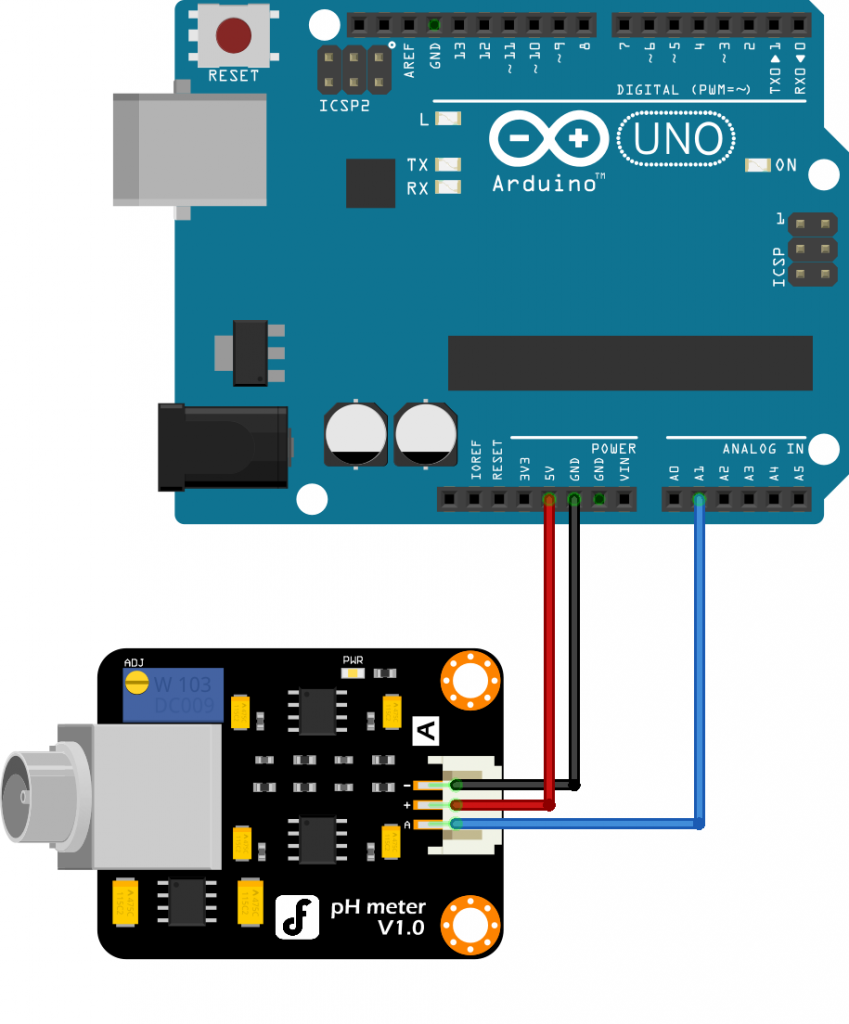
Skema mengkalibrasi sensor pH dengan arduino:
Sktech program pengkalibrasian sensor ph pada arduino :
#define pinPH A1
#define suhuPengukuran 25
#include "DFRobot_PH.h"
DFRobot_PH ph;
float voltagePH;
float phValue;
long millisBacaSensor;
void setup()
{
Serial.begin(9600);
Serial.println("Kalibrasi sensor PH melalui serial monitor");
Serial.println("Buka serial monitor dan kirim (send) sebarang karakter");
Serial.println("https://www.project.semesin.com");
Serial.println();
ph.begin();
}
void loop()
{
if (millisBacaSensor < millis())
{
millisBacaSensor = millis() + 3000;
voltagePH = analogRead(pinPH) / 1024.0 * 5000; // read the ph voltage
phValue = ph.readPH(voltagePH, suhuPengukuran); // convert voltage to pH with temperature compensation
byte PH = round(phValue);
Serial.println();
Serial.print("voltagePH = ");
Serial.println(voltagePH);
Serial.print("phValue = ");
Serial.println(phValue);
Serial.print("PH = ");
Serial.println(PH);
}
if (Serial.available())
{
Serial.readString();
Serial.println();
Serial.println("Proses kalibrasi, ikuti petunjuk di serial monitor");
ph.calibration(voltagePH, suhuPengukuran, "ENTERPH");
while (!Serial.available());
Serial.readString();
voltagePH = analogRead(pinPH) / 1024.0 * 5000; // read the ph voltage
ph.calibration(voltagePH, suhuPengukuran, "CALPH");
ph.calibration(voltagePH, suhuPengukuran, "EXITPH");
}
}
library : DFRobot_PH.zip