Prinsip kerja mengukur panjang benda bergerak adalah dengan menghitung kecepatan benda tersebut kemudian dikalikan dengan waktu benda tersebut melewati sebuah titik.
Persamaan mencari panjang benda bergerak:
Panjang benda (m) = Kecepatan (m/s) x waktu lewat (dtk)

Mencari kecepatan benda menggunakan rumus:
Kecepatan (m/s) = jarak (m) / waktu tempuh (dtk)
Pengukuran waktu tempuh dimulai saat objek menyentuh sensor 1 dan berakhir saat objek menyentuh sensor 2. Dengan jarak sensor 1 dan 2 yang tetap, maka pembagian jarak sensor dengan waktu tempuh akan menghasilkan kecepatan.
Mengukur kecepatan benda dengan arduino membutuhkan respon/penanganan yang cepat. Untuk itu pengukuran kecepatan benda dengan arduino digunakan timer1 16-bit dengan prescale 1 (presisi maksimum 1/16juta detik).
Sedangkan guna mengukur panjang benda dengan arduino dibutuhkan data waktu benda melintasi satu titik. Waktu tempuh benda dihitung saat benda menyentuh sensor dan selesai saat benda meninggalkan sensor. Perkalian antara waktu ini dengan kecepatan benda akan diperoleh panjang benda tersebut.
Komponen yang digunakan untuk menentukan kecepatan objek dengan arduino:
- Arduino Uno
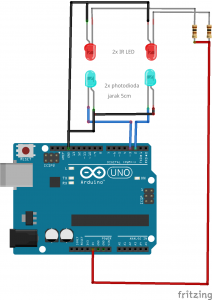
- Photo dioda 2 buah jarak 5 cm.
- IR LED 2 buah didepan photo dioda
- Resistor 100 ohm 2 buah
skema mengukur panjang benda dengan arduino:
sketch/program cara mencari panjang benda bergerak dengan arduino :
#define sensor1 2
#define sensor2 3
#define jarakSensor 0.05 //meter
#define waktuTick 1/8000000 //detik
#define mpsKekmph 3.6
volatile uint16_t waktuA;
volatile uint16_t waktuB;
volatile uint16_t overFlowA;
volatile uint16_t overFlowB;
volatile uint16_t panjangA;
volatile uint16_t panjangB;
volatile uint16_t overflowTimer;
volatile bool dariA;
volatile bool dariB;
volatile bool sampaiA;
volatile bool sampaiB;
volatile bool lewatA;
volatile bool lewatB;
uint8_t maskSensor1;
uint8_t maskSensor2;
uint8_t *pinSensor1;
uint8_t *pinSensor2;
void setup() {
Serial.begin(9600);
Serial.println("Pengukuran panjang objek bergerak dengan Arduino");
Serial.println("dan photo dioda menggunakan metode interupsi serta timer");
Serial.println("https://www.project.semesin.com");
pinMode(sensor1, INPUT_PULLUP);
pinMode(sensor2, INPUT_PULLUP);
maskSensor1 = digitalPinToBitMask(sensor1);
pinSensor1 = portInputRegister(digitalPinToPort(sensor1));
maskSensor2 = digitalPinToBitMask(sensor2);
pinSensor2 = portInputRegister(digitalPinToPort(sensor2));
EIFR |= _BV(INTF1) |_BV(INTF0);
TIMSK1 |= _BV(TOIE1);
TCCR1A = 0;
attachInterrupt(digitalPinToInterrupt(sensor1), objekMelewatiA, CHANGE);
attachInterrupt(digitalPinToInterrupt(sensor2), objekMelewatiB, CHANGE);
}
void loop() {
double waktuSampai;
double waktuLewat;
double Kecepatan;
double Panjang;
if(dariA && sampaiB && lewatB)
{
waktuSampai = 1.0 * (double)waktuTick * ((uint32_t)waktuB + (overFlowB * 65535));
waktuLewat = 1.0 * (double)waktuTick * ((uint32_t)panjangB + (overflowTimer * 65535));
Kecepatan = 1.0 * jarakSensor / waktuSampai;
Panjang = 1.0 * (waktuLewat - waktuSampai) * Kecepatan;
Serial.print("Panjang = ");
printDouble(Panjang, 6);
Serial.println(" meter");
Serial.print("Kecepatan = ");
printDouble(Kecepatan, 6);
Serial.print(" meter/detik (");
printDouble(Kecepatan * mpsKekmph, 6);
Serial.println(" km/jam) dari B ke A");
dariA = false;
sampaiB = false;
lewatB = false;
}
else if(dariB && sampaiA && lewatA)
{
waktuSampai = 1.0 * (double)waktuTick * ((uint32_t)waktuA + (overFlowA * 65535));
waktuLewat = 1.0 * (double)waktuTick * ((uint32_t)panjangA + (overflowTimer * 65535));
Kecepatan = 1.0 * jarakSensor / waktuSampai;
Panjang = 1.0 * (waktuLewat - waktuSampai) * Kecepatan;
Serial.print("Panjang = ");
printDouble(Panjang, 6);
Serial.println(" meter");
Serial.print("Kecepatan = ");
printDouble(Kecepatan, 6);
Serial.print(" meter/detik (");
printDouble(Kecepatan * mpsKekmph, 6);
Serial.println(" km/jam) dari A ke B");
dariB = false;
sampaiA = false;
lewatA = false;
}
else if(dariA || dariB)
{
if(overflowTimer > 5000)
{
dariA = false;
dariB = false;
TCCR1B = 0;
Serial.println("Terlalu lambat");
}
}
}
void objekMelewatiA()
{
if(*pinSensor1 & maskSensor1)
{
if(dariB)
{
waktuA = TCNT1;
overFlowA = overflowTimer;
sampaiA = true;
}
else
{
TCNT1 = 0;
TCCR1B = _BV(CS10);
TIFR1 |= _BV(TOV1);
overflowTimer = 0;
dariA = true;
}
}
else if(dariB && sampaiA)
{
panjangA = TCNT1;
TCCR1B = 0;
lewatA = true;
}
EIFR |= _BV(INTF0);
}
void objekMelewatiB()
{
if(*pinSensor2 & maskSensor2)
{
if(dariA)
{
waktuB = TCNT1;
overFlowB = overflowTimer;
sampaiB = true;
}
else
{
TCNT1 = 0;
TCCR1B = _BV(CS10);
TIFR1 |= _BV(TOV1);
overflowTimer = 0;
dariB = true;
}
}
else if(dariA && sampaiB)
{
panjangB = TCNT1;
TCCR1B = 0;
lewatB = true;
}
EIFR |= _BV(INTF1);
}
ISR(TIMER1_OVF_vect)
{
overflowTimer++;
}
void printDouble(double nilai, byte belakangKoma)
{
if(nilai < 0.0)
{
Serial.print('-');
nilai = -nilai;
}
Serial.print ((long)nilai);
if( belakangKoma > 0)
{
Serial.print(".");
unsigned long frac;
unsigned long mult = 1;
byte padding = belakangKoma - 1;
while(belakangKoma--)
{
mult *=10;
}
if(nilai >= 0)
{
frac = (nilai - int(nilai)) * mult;
}
else
{
frac = (int(nilai)- nilai ) * mult;
}
unsigned long frac1 = frac;
while( frac1 /= 10 )
{
padding--;
}
while( padding--)
{
Serial.print("0");
}
Serial.print(frac,DEC) ;
}
}